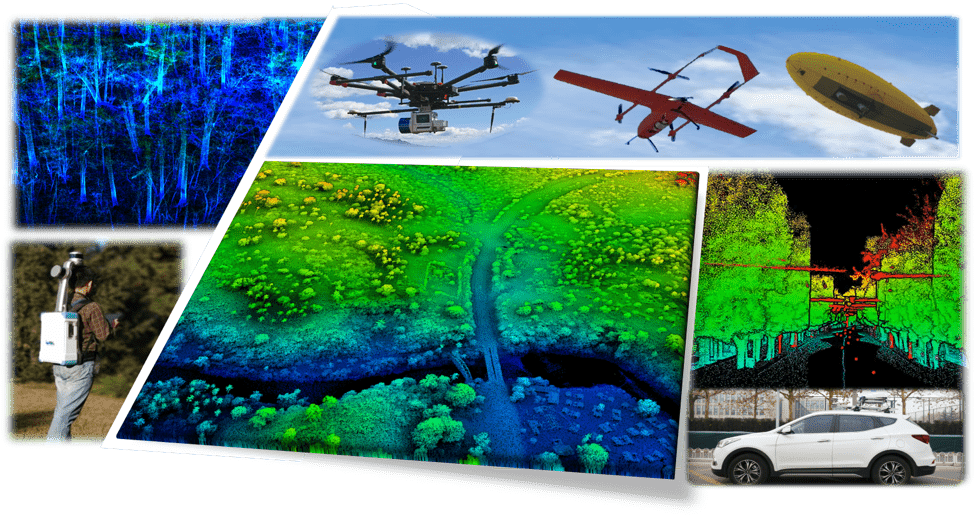
Light detection and ranging (lidar), an active remote sensing technology, has the abilities of high-precision and strong penetration to vegetation, which shows unparalleled advantages in obtaining forest resource information comparing with other traditional remote sensing technologies. In this context, we designed and developed a series of near-surface remote sensing systems, which provide a new solution for accurately and effectively acquire forest resource information at forest stand and landscape scales. These systems are equipped with various remote sensing sensors (e.g., camera, multispectral imager, hyperspectral imager, thermal imager, and laser scanner), and can be mounted on various near-surface platforms (e.g., drones, backpack, mobile vehicles). These systems have the advantages of high stability, high accuracy, high efficiency, and high flexibility, which solves the problem of acquiring near-surface remote sensing data with high precision under GPS-denial environments (e.g., dense forest) and low platform stability (Guo et al., 2016; Guo et al., 2017; Guo et al., 2017). Comparing to traditional forest inventory methods, the acquisition efficiency of forest resource information using the developed near-surface remote sensing platforms has been increased by more than ten times. We further developed an algorithm that can fuse multiplatform lidar data based on individual tree locations, which provide an automatic solution for fusing multiplatform lidar data for acquiring more complete forest structural parameters (Guan et al., 2020). These developed systems can be used to carry out the task of monitoring three-dimensional (3D) structure dynamics of forest vegetation from individual to national and global scales, which can promote the vegetation and biodiversity studies as well as provide accurate and reliable decision-making information to forest managers.