Vegetation maps provide crucial information for ecological studies, biodiversity conservation, vegetation management and restoration, and national strategic decision making. The current vegetation map of China was produced by a team of more than 250 scientists over the course of two decades starting in the 1980s, who spent a huge amount of efforts to manually delineate […]
Forest tree height across the Sierra Nevada-1
Forests of the Sierra Nevada (SN) mountain range are valuable natural heritages for the region and the country, and tree height is an important forest structure parameter for understanding the SN forest ecosystem. There is still a need in the accurate estimation of wall-to-wall SN tree height distribution at fine spatial resolution. In this study, […]
Global mangrove forest AGB map-1
Mangrove forest ecosystems are distributed at the land–sea interface in tropical and subtropical regions and play an important role in carbon cycles and biodiversity. Accurately mapping global mangrove aboveground biomass (AGB) will help us understand how mangrove ecosystems are affected by the impacts of climatic change and human activities. Light detection and ranging (LiDAR) techniques […]
Benchmark dataset for airborne lidar scanning data filtering in forested environments-1
Data description: Airborne laser scanning (ALS) data is one of the most commonly used data for terrain products generation. Filtering ground points is a prerequisite step for ALS data processing. Because canopy cover and terrain slope are various in forested environments, filtering in forested environments is more challenging than filtering in other environments, such as […]
Automatic multi-view lidar registration tool-1
Light detection and ranging (lidar) can be used to accurately estimate forest structure attributes using the rich three-dimensional (3D) information within the lidar point clouds, and has been proven to be highly useful for forest inventory practices. Currently, airborne, unmanned aerial vehicle (UAV)-borne, mobile, and terrestrial lidar systems are the most commonly used lidar platforms […]
Forest tree height map of China-1
Spatially continuous estimates of forest canopy height at national to global scales are critical for quantifying forest carbon storage, understanding forest ecosystem processes, and developing forest management and restoration policies to mitigate global climate change. Spaceborne light detection and ranging (lidar) platforms, especially the Global Ecosystem Dynamics Investigation (GEDI) and Ice, Cloud, and land Elevation […]
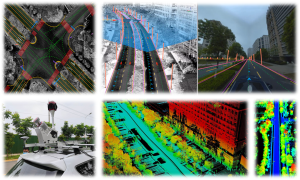
Intelligent Driving: Essential Tech Research & Development-1
Environmental perception and high-precision positioning are the core research contents of self-driving. These factors help cars obtain accurate real-time positioning information and make correct path planning decisions. However, some problems still exist, including difficulty in recognizing and efficiently realizing complete road mapping, inadequate automation, poor positioning robustness, and so on. To solve these problems, based […]
Animal 3D Ecology: Ecosystem Structure Reconstruction & Application-1
Knowledges about processing of interactions within organisms, between organisms and environment form bedrock of understanding how ecosystem organized. Interactions in forest ecosystem are inferred from patterns of spatial-temporal co-occurrence or avoidance in physical space. Based on the complexity of three-dimensional (3D) ecosystem, ecologists urgently need accurate in-situ data to construct nonlinear relationships and describe complex […]